Consistent Hash
1. 概述
传统的哈希表设计中,添加或者删除一个槽位,会造成全量的重新映射, 一致性哈希则追求的是增量式重新映射。多用于分布式系统中的扩容缩容问题、 分布式哈希表的设计等等。
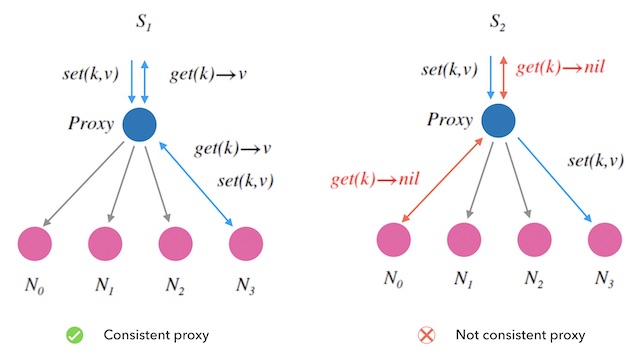
寻找一种算法:把随机到来的 key ,一致地映射到 n 个槽中。且,映射尽量平均
一致性哈希算法应当有两个性质:
- 映射均匀:随机的 key ,映射到后端的概率尽量相等;
- 映射一致性:
- 1.相同的 key 和 n ,一定会有相同的输出;
- 2.当槽数目 n 增减时,映射结果和之前不一致的数量要尽量少。
2. 哈希环算法
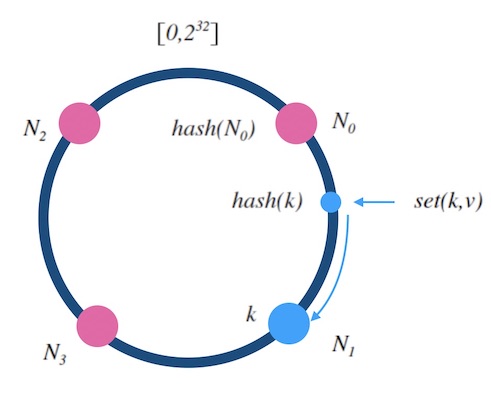
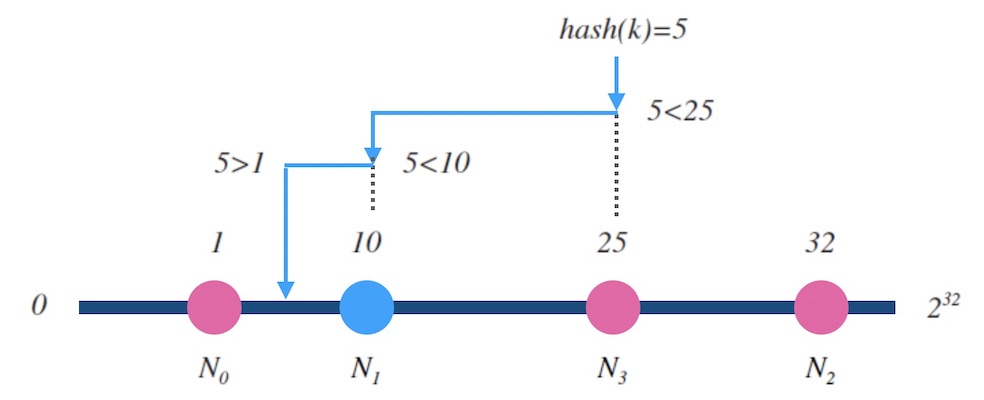
- 设 hash(key) 是映射到区间[0, 2^32]上的一个哈希函数。把区间首尾相连,形成一个顺时针增长的哈希环。
- 将所有节点N0,N1,...,的标号0,1,...,n-1 依次作为 key,进行hash(key)计算,把结果分别标记在环上。
- 对于关于 k 的映射,求 z = hash(k),标记在环上:
- 如果 z 正好落在槽位上,返回这个槽位的标号;
- 否则,顺时针寻找最近的槽位,返回槽位标号。
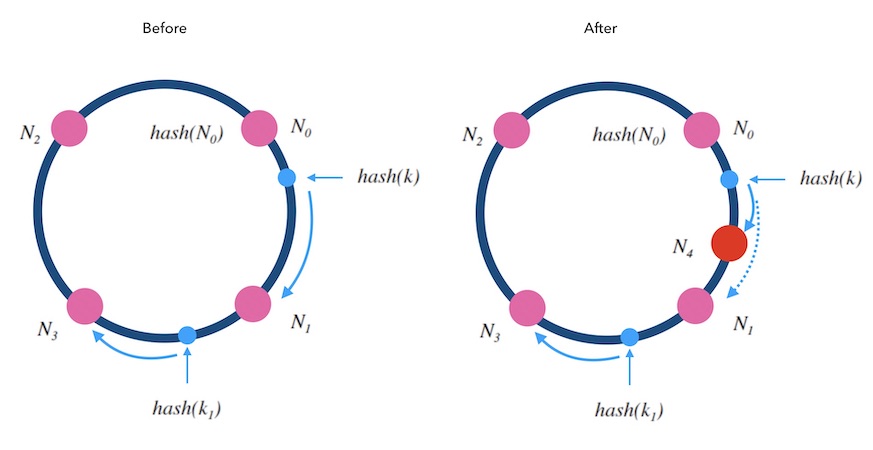
2.1. 添加节点
新增的节点 N4 ,拦截了原本到下一节点 N1 的部分映射,其他节点不受影响。所以,只需把 N1 的数据迁移到 N4 上才可以正常服务。
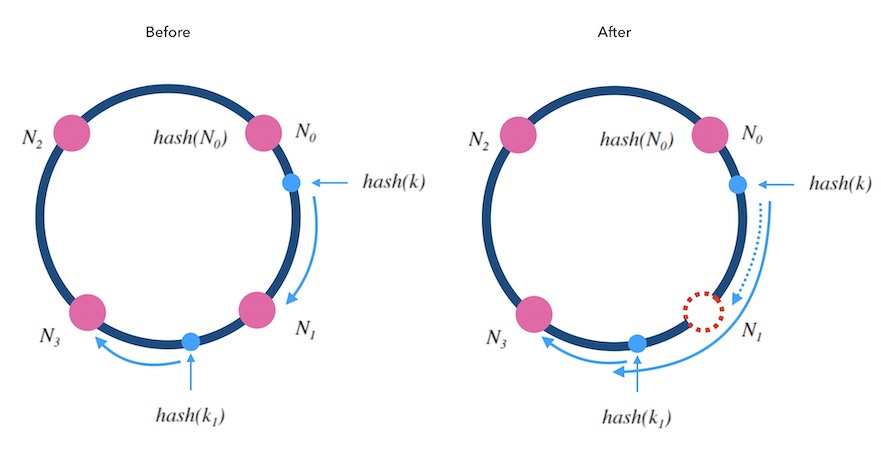
2.2. 删除节点
被删除的节点 N1 的映射会转交给下一节点 N3 ,其他节点不受影响。所以,只需把 N1 的数据迁移到 N3 上才可以正常服务。
2.3. 总结
- 哈希环做到了在 扩缩容 前后的增量式的重新映射,避免了全量的重新映射。
- 添加或删除结点,只会影响一个槽位的映射量,就是 1 / n ,因此,哈希环做到了最小化重新映射(minimum disruption)。
- 时间复杂度:O(logn)
- 空间复杂度:O(n)
复杂度分析:节点标号哈希映射到区间[0, 2^32]上后,形成一个有序表,可以做二分查找。
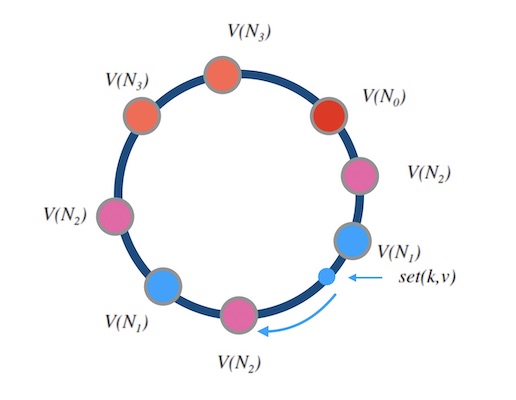
2.4. 带权重的哈希环
对节点添加权重,可以通过构造很多指向真实节点的影子节点(虚拟节点)。权重越大,影子节点越多,被选中的概率就大。
比如:N0,N1,N2,N3 的权重比是 1:2:3:2。
实际应用中,即使节点是平权的,也会采用影子节点。比如采用一个节点对应 40 个影子节点。节点越多,映射的分布越均匀,采用影子节点可以减少真实节点之间的负载差异。
影子节点带来的好处:
- 提高了映射结果的均匀性;
- 实现了加权映射;
坏处:增加了内存消耗和查找时间。时间复杂度变为O(log40n),空间复杂度变为O(40n)。
2.4.1. 容灾
- 扩容:新节点需要同步下一节点的数据后才能正常服务;
- 缩容:需要先备份数据到下一节点后才能正常服务;
- 故障:节点突然故障被移除,数据丢失。
热扩缩容:(不停服进行增删节点)
- 数据备份(双写):数据写到某个节点时,同时写一份备份到顺时针的邻居节点。
- 请求中继(代理):新节点刚加入后,数据没有同步完成时,对读取不到的数据,可以把请求中继到顺时针方向的邻居节点。
相邻节点同时故障:可以备份两次,每个写请求都将备份同步到顺时针方向的最近的两个节点上。
同时添加正好在环上相邻的节点:请求中继两次,一个节点上查不到数据,就中继给下一个节点,最多两次中继。